About
The Game
Team Abilities
In terms of team members for the 2020 season, we had 4 strong CAD students and experienced mentors for design, mechanical, and electrical. We had sponsors for laser cutting for metal and waterjet for lexan parts. This was the first year that we had structural 3D printed parts (PLA), and our second year of using a LimeLight.
Robot Name
Fun Lore
none
The Robot

The robot had a west coast drive with a ground pickup on a virtual four bar, feeding into a funnel for indexing with a 5-ball capacity. It had a Limelight for vision tracking and could score in the high goal, using a hood with two positions. It was short enough to go through the trench. The climber had a virtual four bar deployment with a winch. It had an electrical box to house most electrical components.
Mechanical Design
Drive Train
The West coast drive train had 6 wheels with a centre drop and ran on 4 Falcon motors. This was the first time we used brushless motors and our first experience with Falcons. The standard 6” high grip wheels from AndyMark were used. A metal baseplate was used for the first time.
During a practice session, when the robot was spinning, the battery was ejected from the robot and caused backdriving in the Falcons. This fried some of the electrical components (LimeLight, VRM, PCM). This issue was later fixed in a firmware update. The bolts on the output shafts of the Falcons required Loctite, which was difficult to perform maintenance for due to small clearances, and required significant disassembly.
During our competition, we did not have any issues with the drivetrain.

Intake
The intake deployed via a piston-actuated virtual four bar and had 3 rollers; the first had AndyMark compliant wheels and the following two were ABS pipe rollers with 3D printed hubs. The rollers were powered by a bag motor. The side plates were made of lexan to absorb impacts and they were spaced using 3D printed spacers.

There were no dead zones in the geometry, but we found that the compression was too high (or a stronger motor was required) when doing high speed pickups and the balls would make contact with the bag motor. We had grip on the first roller for better pickup and at different heights depending on where balls were on the field, but found that the subsequent rollers did not need additional grip. The shafts went through both of the rollers for rigidity, but for similar designs in the future, a dead axle design could be tried.
We had issues with overtightening the bolts connecting the lexan side plates, causing the spacers to crack and need replacement. The deployment worked well, but we would increase the robustness of the metal used in the four bar, as the metal plates bent with use (intake impacting with walls). The turn buckles for the chain tension on the virtual four bar worked well, but would loosen over time (see second image in the funnel section). The intake also relied on the bumpers as a hard stop, but the bumpers were not made with high precision so the intake geometry needed to be adjusted. The bearings in the intake would also fall out during use occasionally. In the future we should have either better bearing retention, or more rigid lexan intake plates so they don’t bend and push the bearings out during collisions with the intake.
The intake could also jam if a ball was not fully contained in between the lexan side plates. The 2020 game piece was extremely grippy, and it wouldn’t center into the intake well, causing the ball to compress and get stuck in the wheels.
Funnel
One side of the funnel had a polycord Belt to agitate the balls and push them into the conveyor. It went from a width equivalent to two balls wide down to one ball wide. Three balls could be stored in the funnel at a given time.
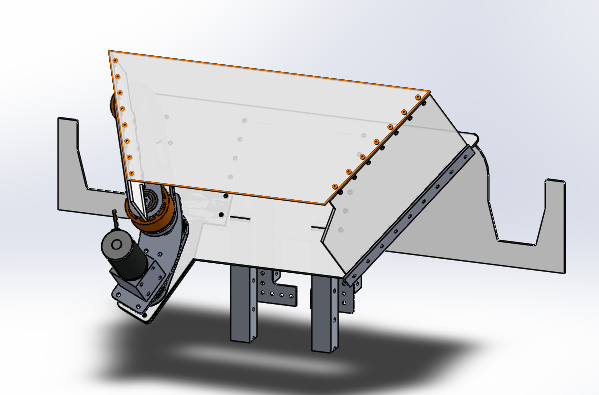
We had issues with balls falling out because there was no lexan top in the actual version, due to weight limitations. Metal Pulleys were originally used, but were swapped to crown pulleys to avoid damaging the balls. Extra lexan was added to the intake to better guide the balls into the funnel and prevent balls from falling out. The funnel mounting design was not optimal for maintenance, as the lexan blocked access. The plate on the top side of the polycord Belt would dig into the ball and limit proper contact/indexing.

Conveyor
The conveyor fed the balls indexed by the funnel into the shooter using polycord belts on 3D printed crown Pulleys, and it was powered by another bag motor.
The transition from the funnel to the conveyor was not fully planned, and thus there were issues with geometry and dead spots. The crown Pulleys were not perfectly aligned, causing the polycord belts to slip off frequently. Ball jams frequently occurred in the conveyor.
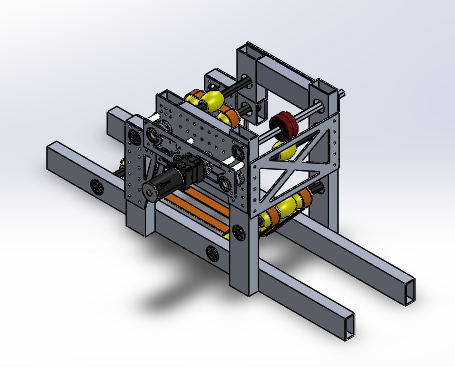
Shooter
The shooter was powered by 2 neos. The hood was 3d printed pla, and had slots in it to have two positions for a wide range of shooting locations. The hood was powered by a single acting piston, defaulting into the closer range. The shooter also had a LimeLight to align to the goal, as well as a general range finding algorithm for either a long range shot from the trench or a closer initiation line shot. The shooter also had an acceleration wheel to help minimize the load on the main flywheel and maintain flywheel fire rate.
The shooter itself was quite rigid and had a reasonable firing rate. Generally it was more accurate than many shooters in the field, and had reasonable inner percentage rate. There was some left/right inaccuracy that we saw due to inconsistent loading of the power cells through the shooter. This was because the actual feed of the shooter had some range left right where the ball could enter the shooter and thus the output saw that same error as well.
For the robot to shoot we would back off the conveyor, kicker, and flywheel to give some gap for the shooter to spin up, then it would have the flywheel spin up. Once the flywheel was within range, the kicker and conveyor would launch the balls.
The shooter also had some jamming issues with the powercells, where either two balls would get stuck compressed together near the feeding wheel, or sometimes the power cell would get stuck in-between the feeding wheel and the flywheel. We never fully determined the cause of this, but we had a few potential ideas.
- Part of the de-jam code actually jammed it by reversing
- The logic for slowly indexing balls in sequence failed, and the powercell bypassed the feeding wheel and made contact with the flywheel that jammed balls in
- Some difference in grip between the polycord belting and the wheels causing the ball to get stuck
We also started designing a second revision for the shooter that had a sheet metal hood with rack and pinion adjustability for the hood. The primary goal of this was to be able to shoot from the protected zone right in front of the goal. Our two position hood didn’t have the ability to do this as the hood would need to be at a much steeper angle. We never ended up building this however as FIRST events shut down due to covid.
Climber
The climber was a combination of two mechanisms; a virtual four bar hook delivery system, with a winch mechanism to lift the robot. To move the system the winch and the hook deploy had to move in union.
Hook Deploy
The hooks were stored on the end of a virtual four bar system to get the height to lift the hooks to the climbing bar. The deployment was powered by a singular redline motor
Winch
The winch used rope run off of a spool on either side of the robot. This spool had a very high reduction gearbox on a neo 550. The 550 was chosen specifically because it was the only motor that fit within the space requirements.
Originally the winch had planned pneumatically actuated ratchet wrenches that would prevent back drive. These were removed later because the back drive of the motors thru the gearbox was limited enough that the robot would stay up for long enough.
Software
For aiming the limelight looked at the area of the target in a wide view, and then tried to center the middle of the target to the center of the robot for aiming towards the middle of the goal. The limelight would also automatically switch to a more zoomed in version of targeting if it detected a long range shot (low area target.) Depending on the area that it saw on the targeting, the flywheel rpm would fall into 3 different buckets of range (far shot, mid shot, close shot) This would give the shooter the approximately correct rpm to make shots.
Electrical
is so prettyyyyyyyyyyyyyyyyyy

Key Lessons Learned
- Dealing with multiple foam dodgeballs in a robot requires extreme care to index and pick up.
- 3d Prints were stronger than we thought, and can be used frequently in structural parts
- It’s super important to have good packaging with different subsystems and get different subsystems talking to each other early.
- Blocky cad for marking out subsystem sizes is super useful.
- Back driving motors at huge speed can destroy electronics!